相机成像线性模型
做项目时用到了有关相机内参和外参矩阵的相关知识,所以需要自己了解一些相关的基础。而涉及到相机内参和外参矩阵的内容,经查询后发现此部分跟相机标定有关。
相机标定的主要步骤就是构造一个以图像信息为输入,图像中相关物体轮廓的三维坐标集合的数学模型,然后求解该模型的未知参数(内参矩阵,外参矩阵,畸变参数),最后应用于实际情况。
这里我们仅讨论相机的线性模型的建立,即针孔模型,不考虑畸变等复杂情况。
坐标系简介
为了更清楚的描述模型的建立的过程,这里通常会以下面四个坐标系为基础进行建模。
二维图像坐标系
二维图像坐标系其实也就是以数字图像为基础构造的坐标系,如最常见的二维数组结构组织形式。这里设定列的增长方向为u轴,行的增长方向为v轴。所以$(u,v)$表示数字图像上的某一点的像素坐标。($u,v$通常为非负整数)
二维成像平面坐标系
表示图像物理位置的坐标系,在图像坐标系的基础上乘以每像素的物理尺寸,然后再加上原点的偏移量即可。其坐标系坐标点表示为$(x,y)$
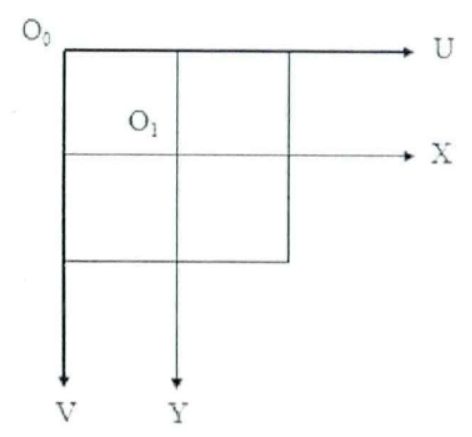
图像坐标系与成像平面坐标系之间的转换关系如下所示:
其中$u_0,v_0$表示原点分别在列方向,行方向的偏移量。如果按上面图片中的理想状态,则满足$u_0=\frac{w}{2},v_0=\frac{h}{2}$。其中$w,h$为图像的宽,高。
$d_x,d_y$分别为x,y方向上每像素的物理尺寸。
三维相机坐标系
其坐标系中的点表示为$(x_c,y_c,z_c)$,其中深度$Z_c$为相机原点距世界坐标系下实物原点的距离。
成像平面坐标系与相机坐标系之间的转换关系推导:
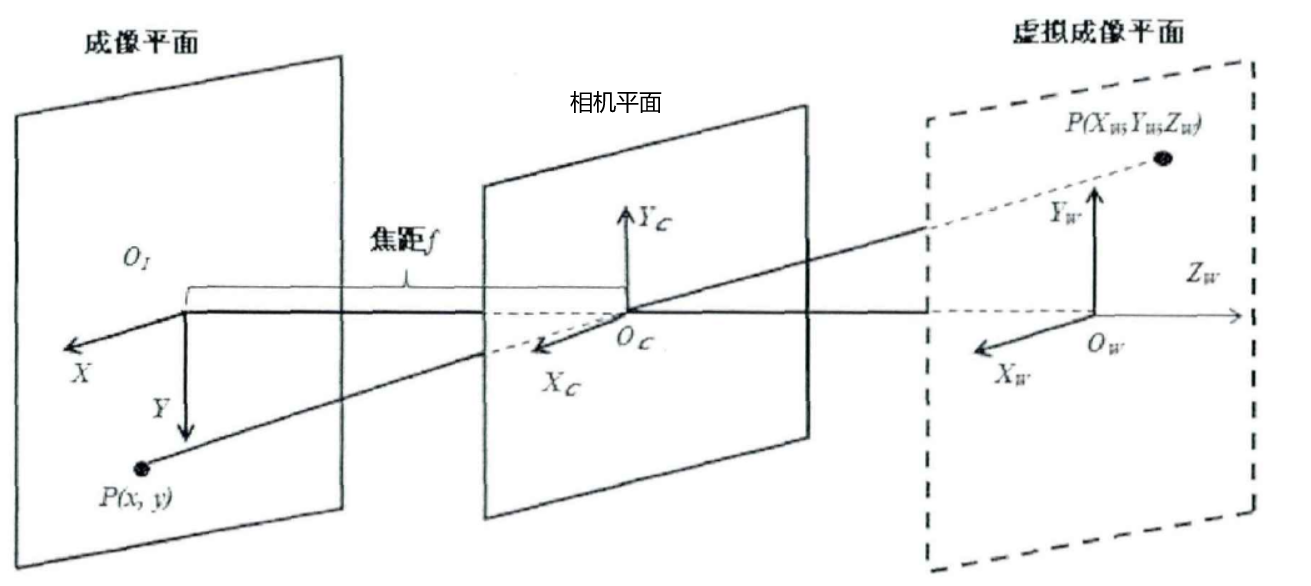
根据上图,我们可以得到如下关系:
可以得到投影矩阵(即成像平面与相机坐标系之间的坐标的关系):
三维世界坐标系
用来描述物体和物体(相机)之间的相对位置关系。定义其坐标系为$(O-X_WY_WZ_W)$,其坐标系下的坐标点为$(x_w,y_w,z_w)$
世界坐标系与相机坐标系之间的坐标的关系如下所示:
其中$\left[\begin{array}{cc}R & t \ 0^{T} & 1\end{array}\right]$可以简单表示为$M$(外参矩阵),$t=(t_1,t_2,t_3)^T是平移矩阵$,$R$是$3\times 3$的正交单位矩阵。
图像坐标系于世界坐标系之间的转换关系
根据上面各个坐标系之间的转换,我们可以得到图像坐标系与世界坐标系之间的转换关系。
其中A为相机内参矩阵,M称为相机外参矩阵

